OMSimulator - FMI and TLM-Based Simulation and Co-simulation of External Models¶
Functional Mock-up Interface - FMI¶
The new standard for model exchange and co-simulation with Functional Mockup Interface (FMI) allows export of pre-compiled models, i.e., C-code or binary code, from a tool for import in another tool, and vice versa. The FMI standard is Modelica independent. Import and export works both between different Modelica tools, or between certain non-Modelica tools. OpenModelica supports FMI 1.0 & 2.0,
- Model Exchange
- Co-Simulation (under development)
FMI Export¶
To export the FMU use the OpenModelica command translateModelFMU(ModelName) from command line interface, OMShell, OMNotebook or MDT. The export FMU command is also integrated with OMEdit. Select FMI > Export FMU the FMU package is generated in the current directory of omc. You can use the cd() command to see the current location. You can set which version of FMI to export through OMEdit settings, see section FMI.
To export the bouncing ball example to an FMU, use the following commands:
>>> loadFile(getInstallationDirectoryPath() + "/share/doc/omc/testmodels/BouncingBall.mo")
true
>>> translateModelFMU(BouncingBall)
"«DOCHOME»/BouncingBall.fmu"
>>> system("unzip -l BouncingBall.fmu | egrep -v 'sources|files' | tail -n+3 | grep -o '[A-Za-z._0-9/]*$' > BB.log")
0
Warning
Warning: The initial conditions are not fully specified. For more information set -d=initialization. In OMEdit Tools->Options->Simulation->OMCFlags, in OMNotebook call setCommandLineOptions("-d=initialization").
After the command execution is complete you will see that a file BouncingBall.fmu has been created. Its contents varies depending on the current platform. On the machine generating this documentation, the contents in Listing 2 are generated (along with the C source code).
binaries/
binaries/linux64/
binaries/linux64/config.log
binaries/linux64/BouncingBall_FMU.libs
binaries/linux64/BouncingBall.so
modelDescription.xml
A log file for FMU creation is also generated named ModelName_FMU.log. If there are some errors while creating FMU they will be shown in the command line window and logged in this log file as well.
By default an FMU that can be used for both Model Exchange and Co-Simulation is generated. We only support FMI 2.0 for Co-Simulation FMUs.
Currently the Co-Simulation FMU supports only the forward Euler solver with root finding which does an Euler step of communicationStepSize in fmi2DoStep. Events are checked for before and after the call to fmi2GetDerivatives.
FMI Import¶
To import the FMU package use the OpenModelica command importFMU,
>>> list(OpenModelica.Scripting.importFMU, interfaceOnly=true)
function importFMU
input String filename "the fmu file name";
input String workdir = "<default>" "The output directory for imported FMU files. <default> will put the files to current working directory.";
input Integer loglevel = 3 "loglevel_nothing=0;loglevel_fatal=1;loglevel_error=2;loglevel_warning=3;loglevel_info=4;loglevel_verbose=5;loglevel_debug=6";
input Boolean fullPath = false "When true the full output path is returned otherwise only the file name.";
input Boolean debugLogging = false "When true the FMU's debug output is printed.";
input Boolean generateInputConnectors = true "When true creates the input connector pins.";
input Boolean generateOutputConnectors = true "When true creates the output connector pins.";
output String generatedFileName "Returns the full path of the generated file.";
end importFMU;
The command could be used from command line interface, OMShell, OMNotebook or MDT. The importFMU command is also integrated with OMEdit. Select FMI > Import FMU the FMU package is extracted in the directory specified by workdir, since the workdir parameter is optional so if its not specified then the current directory of omc is used. You can use the cd() command to see the current location.
The implementation supports FMI for Model Exchange 1.0 & 2.0 and FMI for Co-Simulation 1.0 stand-alone. The support for FMI Co-Simulation is still under development.
The FMI Import is currently a prototype. The prototype has been tested in OpenModelica with several examples. It has also been tested with example FMUs from FMUSDK and Dymola. A more fullfleged version for FMI Import will be released in the near future.
When importing the model into OMEdit, roughly the following commands will be executed:
>>> imported_fmu_mo_file:=importFMU("BouncingBall.fmu")
"BouncingBall_me_FMU.mo"
>>> loadFile(imported_fmu_mo_file)
true
The imported FMU can then be simulated like any normal model:
>>> simulate(BouncingBall_me_FMU, stopTime=3.0)
record SimulationResult
resultFile = "«DOCHOME»/BouncingBall_me_FMU_res.mat",
simulationOptions = "startTime = 0.0, stopTime = 3.0, numberOfIntervals = 500, tolerance = 1e-06, method = 'dassl', fileNamePrefix = 'BouncingBall_me_FMU', options = '', outputFormat = 'mat', variableFilter = '.*', cflags = '', simflags = ''",
messages = "stdout | info | The initialization finished successfully without homotopy method.
stdout | info | The initialization finished successfully without homotopy method.
stdout | info | The simulation finished successfully.
",
timeFrontend = 0.02207595,
timeBackend = 0.011375182,
timeSimCode = 0.042036421,
timeTemplates = 0.029749007,
timeCompile = 0.344970984,
timeSimulation = 0.059554821,
timeTotal = 0.509857462
end SimulationResult;

Figure 44 Height of the bouncing ball, simulated through an FMU.
Transmission Line Modeling (TLM) Based Co-Simulation¶
This chapter gives a short description how to get started using the TLM-Based co-simulation in the tool OMSimulator accessible via OMEdit.
The TLM Based co-simulation provides the following general functionalities:
- Import and add External non-Modelica models such as Matlab/SimuLink, Adams, and BEAST models
- Import and add External Modelica models e.g. from tools such as Dymola or Wolfram SystemModeler, etc.
- Specify startup methods and interfaces of the external model
- Build the composite models by connecting the external models
- Set the co-simulation parameters in the composite model
- Simulate the composite models using TLM based co-simulation
Composite Model Editing of External Models¶
The graphical composite model editor is an extension and specialization of the OpenModelica connection editor OMEdit. A composite model is composed of several external sub-models including the interconnections between these sub-models. External models are models which need not be in Modelica, they can be FMUs, or models accessed by proxies for co-simulation and connected by TLM-connections. The standard way to store a composite model is in an XML format. The XML schema standard is accessible from tlmModelDescription.xsd. Currently composite models can only be used for TLM based co-simulation of external models.
Loading a Composite Model for Co-Simulation¶
To load the composite model, select File > Open Composite Model(s) from the menu and select compositemodel.xml.
OMEdit loads the composite model and show it in the Libraries Browser. Double-clicking the composite model in the Libraries Browser will display the composite model as shown below in tlm-double-pendulum-compositemodel.
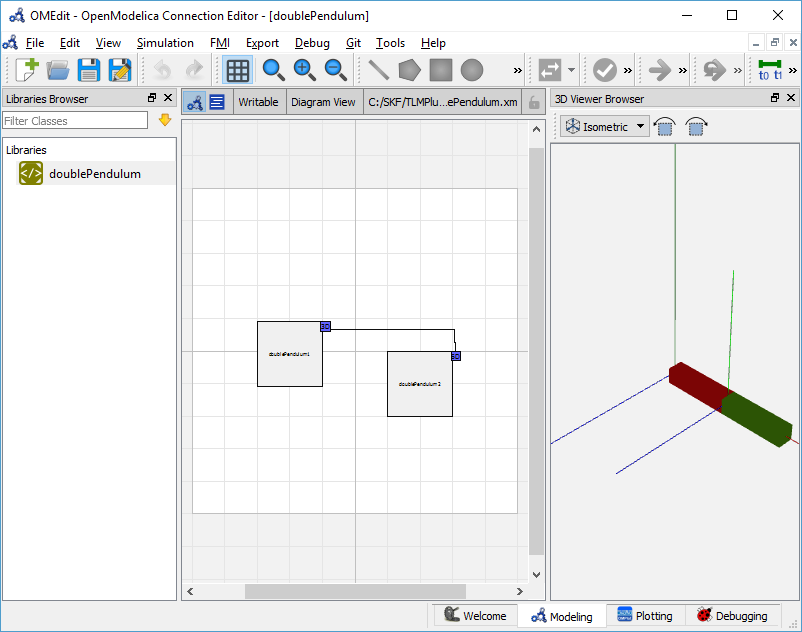
Figure 45 Composite Model with 3D View.
Co-Simulating the Composite Model¶
There are two ways to start co-simulation:
- Click TLM Co-Simulation setup button (
 ) from the toolbar (requires a composite model to be active in ModelWidget)
) from the toolbar (requires a composite model to be active in ModelWidget)
- Right click the composite model in the Libraries Browser and choose TLM Co-Simulation setup from the popup menu (see tlm-library-browser-popup-menu)
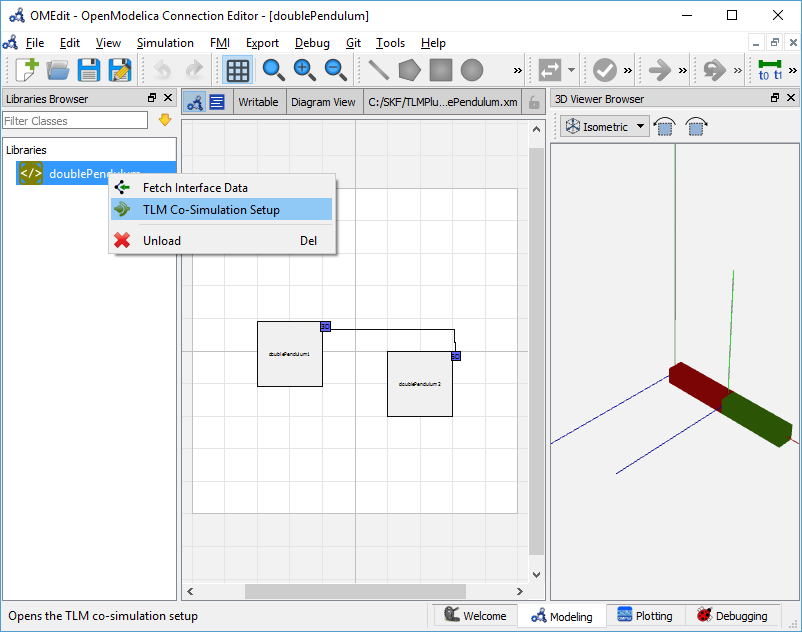
Figure 46 Co-simulating and Fetching Interface Data of a composite model from the Popup Menu .
The TLM Co-Simulation setup appears as shown below in tlm-cosimulation-setup.
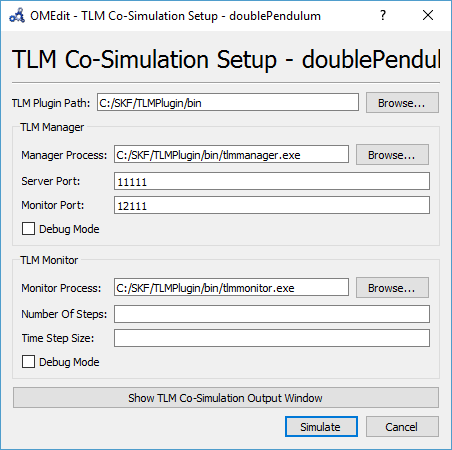
Figure 47 TLM Co-simulation Setup.
Click Simulate from the Co-simulation setup to confirm the co-simulation. tlm-cosimulation-progress will appears in which you will be able to see the progress information of the running co-simulation.
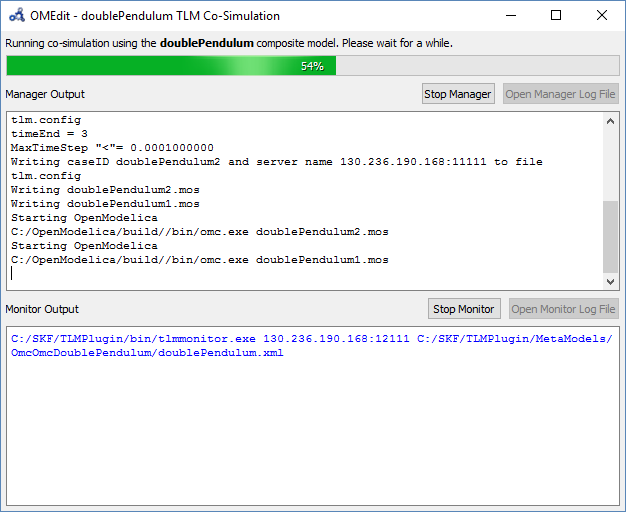
Figure 48 TLM Co-Simulation Progress.
The editor also provides the means of reading the log files generated by the simulation manager and monitor. When the simulation ends, click Open Manager Log File or Open Monitor Log File from the co-simulation progress bar to check the log files.
Plotting the Simulation Results¶
When the co-simulation of the composite model is completed successful, simulation results are collected and visualized in the OMEdit plotting perspective as shown in tlm-plotting-cosimulation-results and tlm-cosimulation-visualization. The Variables Browser display variables that can be plotted. Each variable has a checkbox, checking it will plot the variable.
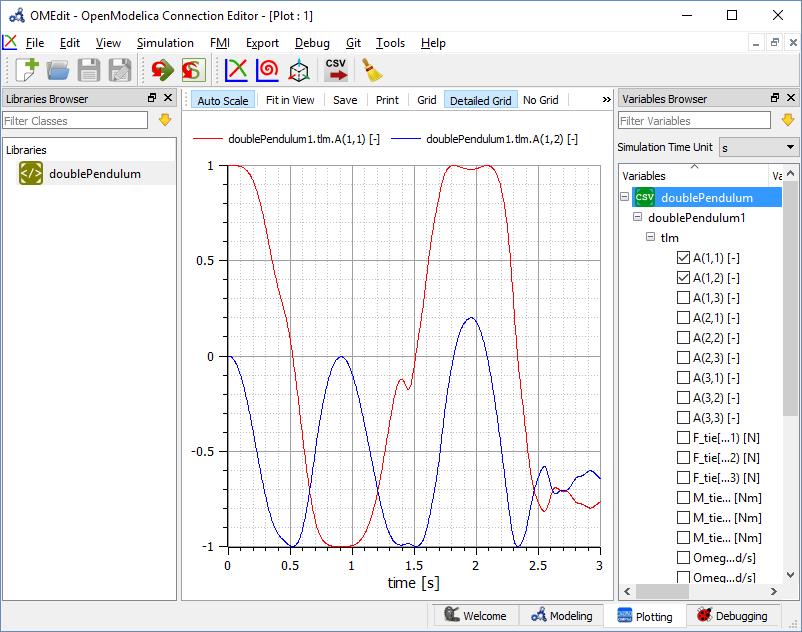
Figure 49 TLM Co-Simulation Results Plotting.
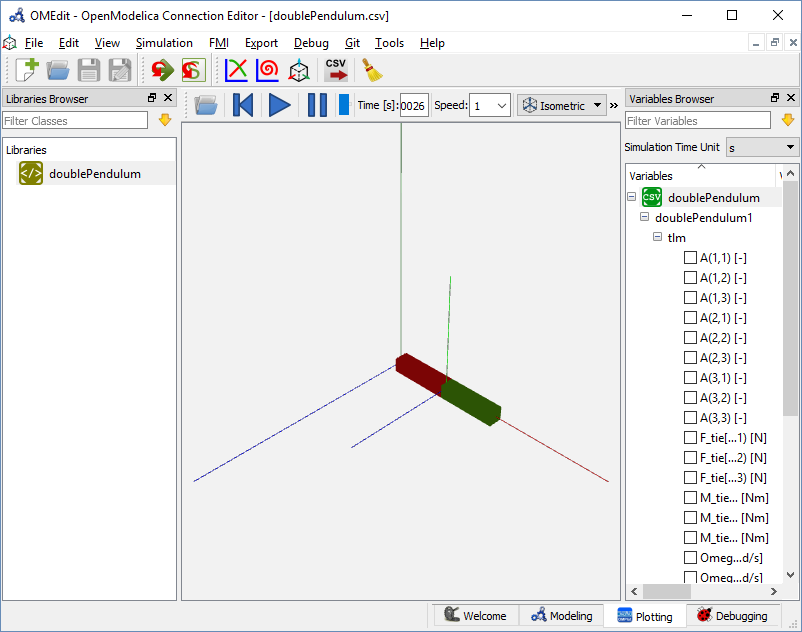
Figure 50 TLM Co-Simulation Visualization.
Preparing External Models¶
First step in co-simulation Modeling is to prepare the different external simulation models with TLM interfaces. Each external model belongs to a specific simulation tool, such as MATLAB/Simulink*, BEAST, MSC/ADAMS, Dymola and Wolfram SystemModeler.
When the external models have all been prepared, the next step is to load external models in OMEdit by selecting the File > Load External Model(s) from the menu.
OMEdit loads the external model and show it in the Libraries Browser as shown below in tlm-loaded-external-models-library-browser.
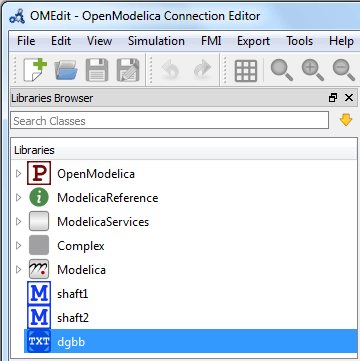
Figure 51 External Models in OMEdit.
Creating a New Composite Model¶
We will use the "Double pendulum" composite model which is a multibody system that consists of three sub-models: Two OpenModelica Shaft sub-models (Shaft1 and Shaft2) and one SKF/BEAST bearing sub-model that together build a double pendulum. The SKF/BEAST bearing sub-model is a simplified model with only three balls to speed up the simulation. Shaft1 is connected with a spherical joint to the world coordinate system. The end of Shaft1 is connected via a TLM interface to the outer ring of the BEAST bearing model. The inner ring of the bearing model is connected via another TLM interface to Shaft2. Together they build the double pendulum with two shafts, one spherical OpenModelica joint, and one BEAST bearing.
To create a new composite model select File > New Composite Model from the menu.
Your new composite model will appear in the in the Libraries Browser once created. To facilitate the process of textual composite modeling and to provide users with a starting point, the Text View (see tlm-new-compositemodel-textview) includes the composite model XML elements and the default simulation parameters.
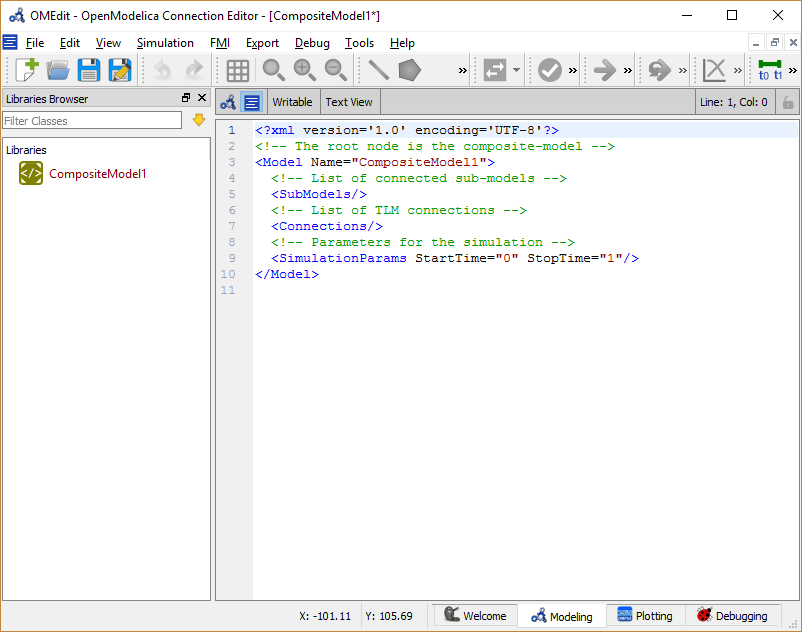
Figure 52 New composite model text view.
Adding Submodels¶
It is possible to build the double pendulum by drag-and-drop of each simulation model component (sub-model) from the Libraries Browser to the Diagram View. To place a component in the Diagram View of the double pendulum model, drag each external sub-model of the double pendulum (i.e. Shaft1, Shaft2, and BEAST bearing sub-model) from the Libraries Browser to the Diagram View.
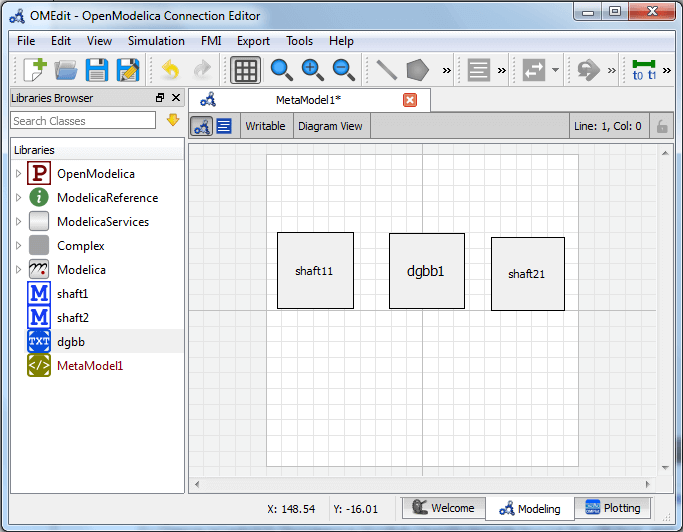
Figure 53 Adding sub-models to the double pendulum composite model.
Fetching Submodels Interface Data¶
To retrieve list of TLM interface data for sub-models, do any of the following methods:
- Click Fetch Interface Data button (
 ) from the toolbar (requires a composite model to be active in ModelWidget)
) from the toolbar (requires a composite model to be active in ModelWidget)
- Right click the composite model in the Library Browser and choose Fetch Interface Data from the popup menu (see tlm-library-browser-popup-menu).
To retrieve list of TLM interface data for a specific sub-model,
- Right click the sub-model inside the composite model and choose Fetch Interface Data from the popup menu.
tlm-fetch-interface-progress will appear in which you will be able to see the progress information of fetching the interface data.
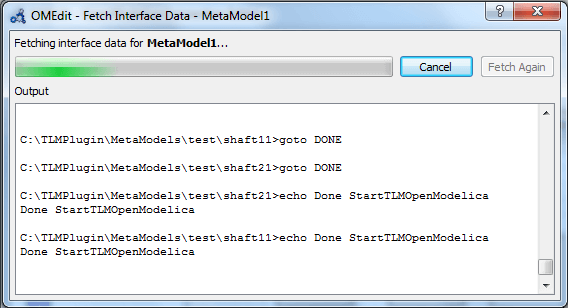
Figure 54 Fetching Interface Data Progress.
Once the TLM interface data of the sub-models are retrieved, the interface points will appear in the diagram view as shown below in tlm-fetched-interface-points.
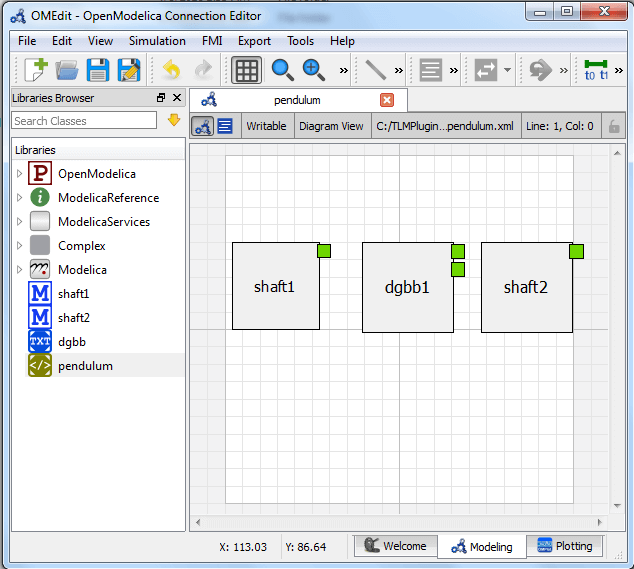
Figure 55 Fetching Interface Data.
Connecting Submodels¶
When the sub-models and interface points have all been placed in the Diagram
View, similar to tlm-fetched-interface-points, the next step is to
connect the sub-models. Sub-models are connected using the Connection Line
Button ( ) from the toolbar.
) from the toolbar.
To connect two sub-models, select the Connection Line Button and place the mouse cursor over an interface and click the left mouse button, then drag the cursor to the other sub-model interface, and click the left mouse button again. A connection dialog box as shown below in tlm-submodels-connection-dialog will appear in which you will be able to specify the connection attributes.
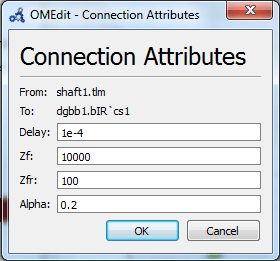
Figure 56 Sub-models Connection Dialog.
Continue to connect all sub-models until the composite model Diagram View looks like the one in tlm-connecting-submodels-double-pendulum below.
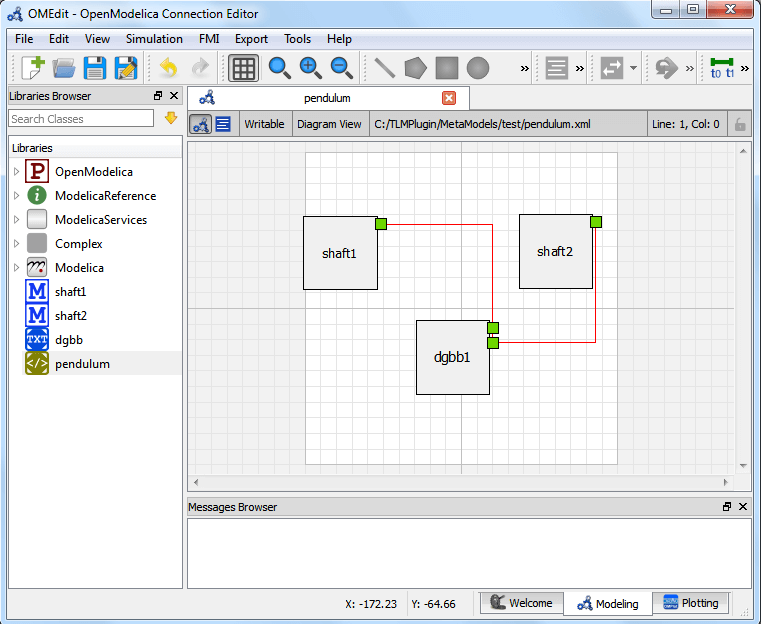
Figure 57 Connecting sub-models of the Double Pendulum Composite Model.
Changing Parameter Values of Submodels¶
To change a parameter value of a sub-model, do any of the following methods:
- Double-click on the sub-model you want to change its parameter
- Right click on the sub-model and choose Attributes from the popup menu
The parameter dialog of that sub-model appears as shown below in tlm-change-submodel-parameters-dialog in which you will be able to specify the sub-models attributes.
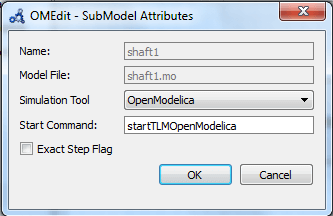
Figure 58 Changing Parameter Values of Sub-models Dialog.
Changing Parameter Values of Connections¶
To change a parameter value of a connection, do any of the following methods:
- Double-click on the connection you want to change its parameter
- Right click on the connection and choose Attributes from the popup menu.
The parameter dialog of that connection appears (see tlm-submodels-connection-dialog) in which you will be able to specify the connections attributes.
Changing Co-Simulation Parameters¶
To change the co-simulation parameters, do any of the following methods:
- Click Simulation Parameters button (
 ) from the toolbar (requires a composite model to be active in ModelWidget)
) from the toolbar (requires a composite model to be active in ModelWidget)
- Right click an empty location in the Diagram View of the composite model and choose Simulation Parameters from the popup menu (see tlm-change-cosimulation-parameters-popup-menu)
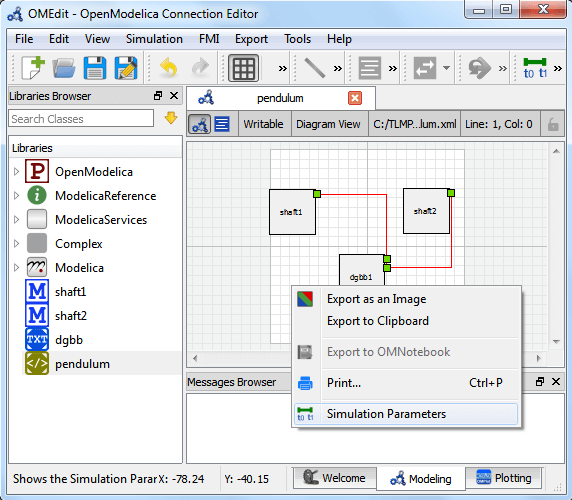
Figure 59 Changing Co-Simulation Parameters from the Popup Menu.
The co-simulation parameter dialog of the composite model appears as shown below in tlm-change-cosimulation-parameters-dialog in which you will be able to specify the simulation parameters.
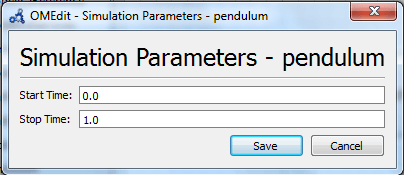
Figure 60 Changing Co-Simulation Parameters Dialog.